Fast Robot Optimization and Simulation Toolkit (FROST)
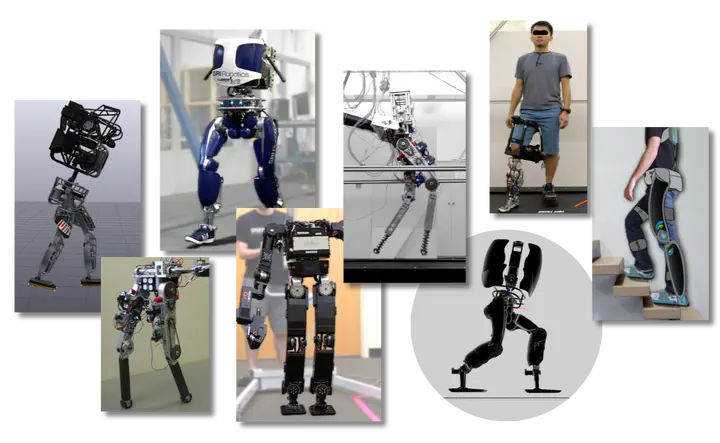 Robot platforms that use FROST.
Robot platforms that use FROST.Introduction
Our research project focuses on developing a fast trajectory optimization framework for high-dimensional robotic systems, specifically humanoid robots. The ability to generate optimal trajectories quickly is crucial for real-time control and efficient motion planning in complex robotic systems. In this project, we introduce FROST (Fast Robot Optimization and Simulation Toolkit), a powerful tool that enables fast trajectory optimization for high-dimensional robotic systems. FROST provides a comprehensive set of tools and algorithms for fast trajectory optimization and simulation for high-dimensional robotic systems. FROST offers the following key features:
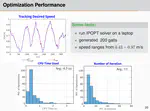
Efficient Optimization Algorithms: FROST implements state-of-the-art optimization algorithms tailored for high-dimensional systems. These algorithms are designed to handle the complex dynamics and constraints of humanoid robots, enabling fast and accurate trajectory optimization.
Real-Time Control: FROST is designed to facilitate real-time control of humanoid robots. By leveraging fast trajectory optimization techniques, FROST allows for rapid generation of optimal trajectories, enabling responsive and agile robot control.
Simulation Capabilities: FROST includes a simulation environment that enables users to evaluate and validate their optimized trajectories. The simulation environment accurately models the dynamics of the humanoid robot, providing a realistic representation of its behavior.
Research Focus
Fast Trajectory Optimization: Our primary research focus is on developing efficient algorithms and techniques for fast trajectory optimization. We aim to overcome the computational challenges associated with high-dimensional robotic systems, allowing for real-time trajectory generation and control.
High-Dimensional Robotic Systems: We specifically target humanoid robots, which possess a large number of degrees of freedom. By addressing the unique challenges posed by high-dimensional systems, we aim to improve the performance and efficiency of trajectory optimization for humanoid robots.
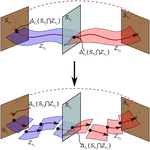
Optimal Control and Motion Planning: Our research aims to integrate optimal control and motion planning techniques to generate high-quality trajectories. By considering both the dynamics of the robot and the desired task objectives, we aim to optimize the robot’s motion to achieve efficient and smooth movements.
Applications
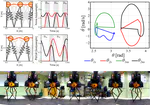
Humanoid Robotics: The fast trajectory optimization capabilities offered by FROST have numerous applications in the field of humanoid robotics. It can be used for tasks such as dynamic walking, running, jumping, and other complex locomotion behaviors.
Motion Planning: FROST can be utilized for motion planning tasks in high-dimensional robotic systems. It enables efficient generation of optimal trajectories for tasks such as manipulation, object grasping, and obstacle avoidance.
Control and Robotics Research: FROST provides a valuable tool for researchers in the field of control and robotics. It allows for rapid prototyping and testing of control algorithms for high-dimensional robotic systems, facilitating advancements in the field.
Robotics Education: FROST can be used as an educational tool to teach students about trajectory optimization and control in high-dimensional robotic systems. Its user-friendly interface and simulation capabilities make it accessible for students to explore and experiment with different optimization techniques.
Summary
Our research project focuses on developing a fast trajectory optimization framework for high-dimensional robotic systems, with a specific emphasis on humanoid robots. Through the development of FROST, a fast robot optimization and simulation toolkit, we aim to enable efficient trajectory generation and control for complex robotic systems. The research focuses on addressing the computational challenges associated with high-dimensional systems and integrating optimal control and motion planning techniques. The applications of this research span various domains, including humanoid robotics, motion planning, control and robotics research, and robotics education.
Publications