Perceptive Humanoid Locomotion and Autonomous Navigation
 Digit walks around randomly placed obstacles in the lab.
Digit walks around randomly placed obstacles in the lab.Introduction
We strive to develop cutting-edge techniques for humanoid robots to achieve natural and efficient locomotion. By integrating advanced visual sensors, such as depth cameras and LiDAR, our robots can perceive their surroundings and adapt their movements accordingly. We are particularly interested in developing algorithms that allow robots to walk over varying terrains, navigate around obstacles, climb stairs, and perform complex maneuvers with stability and agility. We aim to develop intelligent algorithms that allow robots to perceive their surroundings, and then plan optimal gaits and paths in real-time.
Research Focus
- Perception and Mapping: We are developing advanced perception algorithms that enable robots to understand their environment using various sensors, such as cameras, LiDAR, and depth sensors. By fusing sensor data and leveraging techniques like simultaneous localization and mapping (SLAM) in the context of humanoid robots, our robots can create accurate maps of their surroundings.
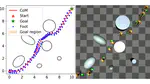
- Path Planning and Obstacle Avoidance: Our research focuses on developing efficient and robust algorithms for path planning and obstacle avoidance. By considering factors such as robot dynamics, environmental constraints, and dynamic obstacles, we aim to generate optimal paths that allow the robot to navigate safely and efficiently. We are particularly interested in exploring model predictive control (MPC) and control barrier functions (CBFs) to achieve safe and adaptive navigation in real time.
- Gait Generation: We are exploring novel approaches to generate stable and adaptive gaits for humanoid robots. By leveraging modern machine learning and optimization techniques, we aim to create walking patterns that can adapt to different terrains, handle unexpected disturbances, and optimize energy efficiency.
- Terrain Adaptation: Humanoid robots often encounter various types of terrains, including rough surfaces, slopes, uneven ground, and stairs. Our research aims to equip robots with the ability to perceive and adapt to different terrains, adjusting their locomotion patterns accordingly.
- Human-Robot Interaction: As humanoid robots become more prevalent in human-centric environments, it is crucial to develop algorithms that enable seamless interaction between robots and humans. Our research explores methods for natural language processing, gesture recognition, and human intention prediction to enhance the robot’s ability to understand and respond to human commands and gestures during navigation.
Applications
The research in perceptive humanoid locomotion and autonomous navigation has numerous potential applications across various domains. Some of the areas where our research can make a significant impact include:
Industrial Automation: Humanoid robots with efficient locomotion and autonomous navigation can be employed in industrial settings to perform tasks that require mobility and adaptability, such as inspection, maintenance, and logistics.
Search and Rescue: By equipping humanoid robots with the ability to navigate autonomously in complex and hazardous environments, they can be deployed for search and rescue missions, helping locate and save lives in disaster-stricken areas.
Assistive Robotics: Humanoid robots with advanced locomotion and navigation capabilities can service customers in many public settings, such as stores and restuarants. This would potentially address labor shortages especially in the service industries.
Summary
At Cyberbotics Lab, our research in perceptive humanoid locomotion and autonomous navigation aims to advance the capabilities of humanoid robots, enabling them to navigate autonomously and achieve human-like locomotion. Through our interdisciplinary approach and collaboration with industry partners, we strive to contribute to the development of intelligent and versatile robots that can operate effectively in real-world environments. Stay tuned for updates on our ongoing research and exciting breakthroughs in this field.