Research Projects
*
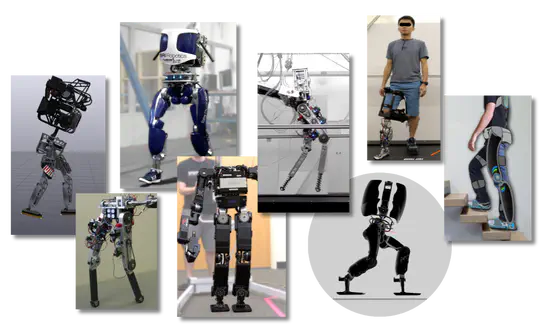
Our research focuses on developing advanced algorithms and technologies to enable humanoid robots to perceive their environment, navigate autonomously, and achieve human-like locomotion.
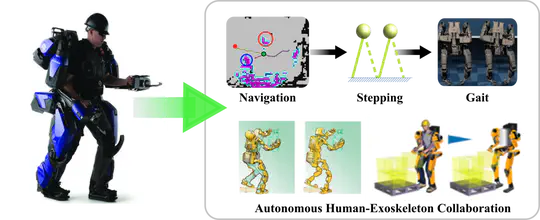
Our primary objective is to enhance industrial assistance and automation by combining the strengths of human-like locomotion and exoskeleton technology, thereby promoting the commercial use of powered exoskeleton for human-machine collaboration in various industrial settings.
As legged robots become increasingly prevalent in various applications, it is crucial to develop robust safety testing methodologies to identify potential risks and ensure safe operation.
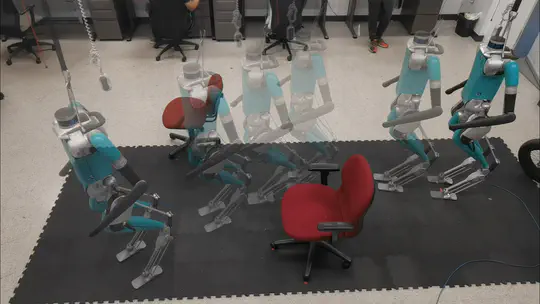
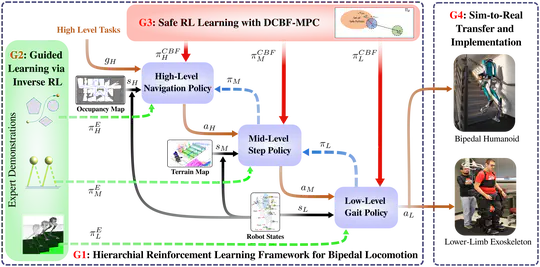
Our research project aims to advance the capabilities of legged robots via novel Hierarchical Reinforcement Learning (HRL) algorithms, enabling them to achieve efficient and adaptive locomotion in complex environments.
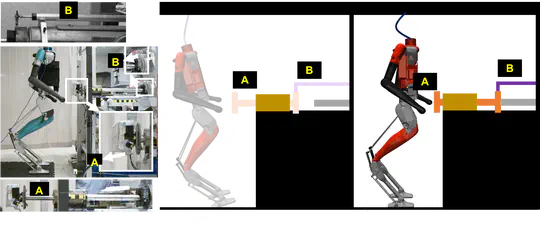
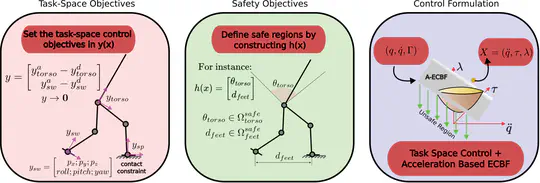
Our focus lies in developing safe and reliable control strategies for underactuated robotic systems, with a particular emphasis on humanoid robots.
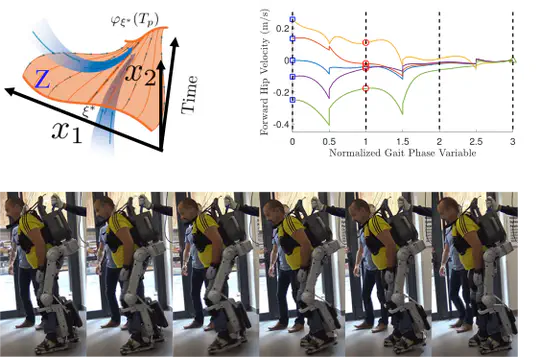
We strive to advancing the field of lower-limb exoskeletons and developing innovative solutions to enhance mobility and independence for individuals with paraplegia.
In this project, we introduce FROST (Fast Robot Optimization and Simulation Toolkit), a powerful tool that enables fast trajectory optimization for high-dimensional robotic systems, such as humanoid robots.