Publications
On the Comparability and Optimal Aggressiveness of the Adversarial Scenario-Based Safety Testing of Robots.
IEEE Transactions on Robotics,
2023.
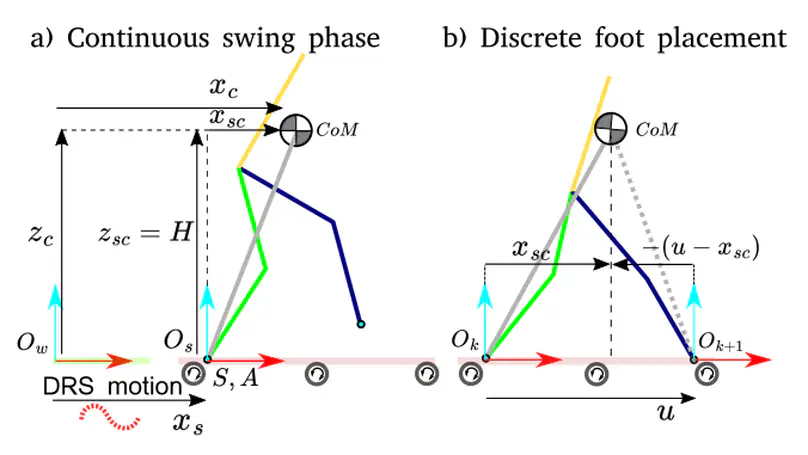

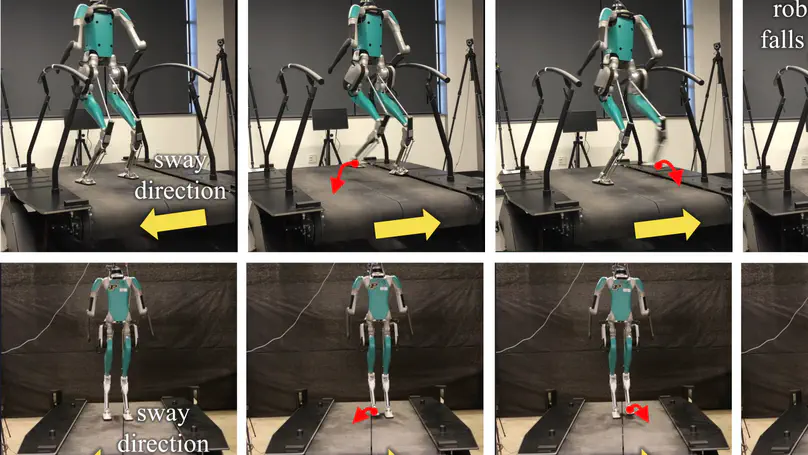
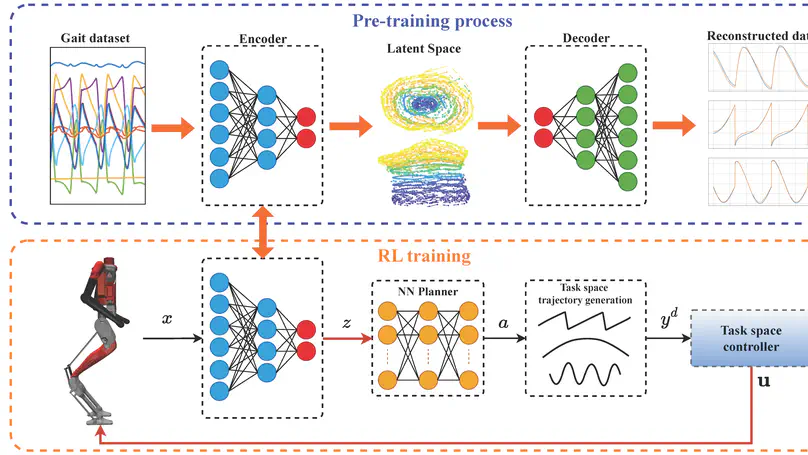
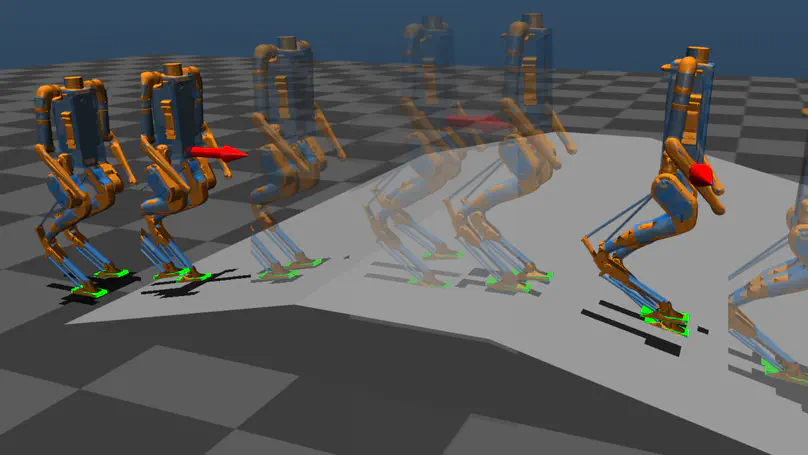
Resolved motion control for 3d underactuated bipedal walking using linear inverted pendulum dynamics and neural adaptation.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2022.

On safety testing, validation, and characterization with scenario-sampling: A case study of legged robots.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2022.
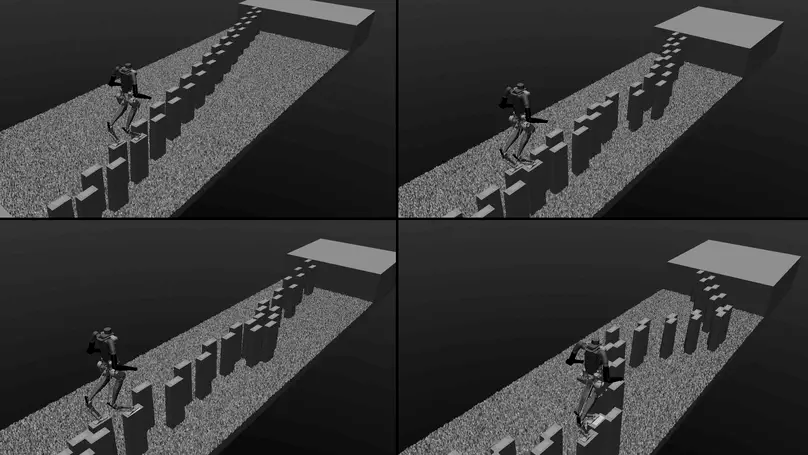
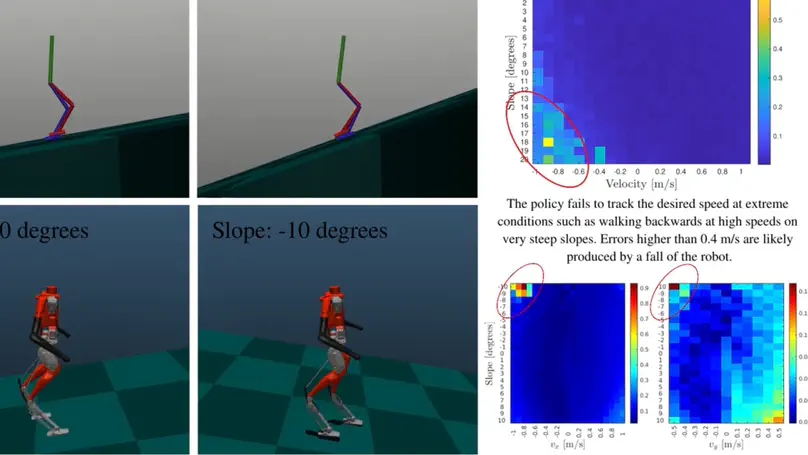
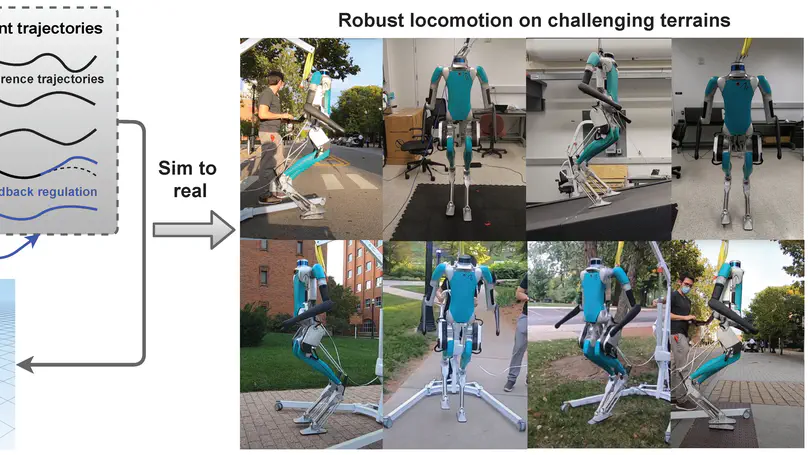
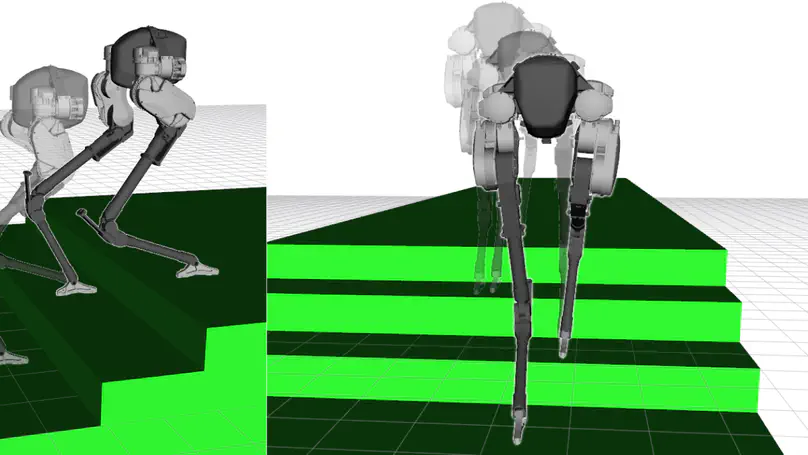
Linear policies are sufficient to realize robust bipedal walking on challenging terrains.
IEEE Robotics and Automation Letters (RA-L),
2022.
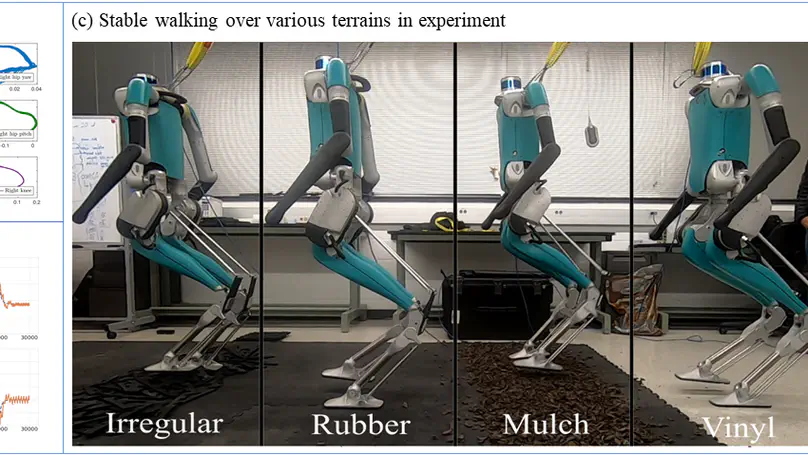
Learning linear policies for robust bipedal locomotion on terrains with varying slopes.
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2021.
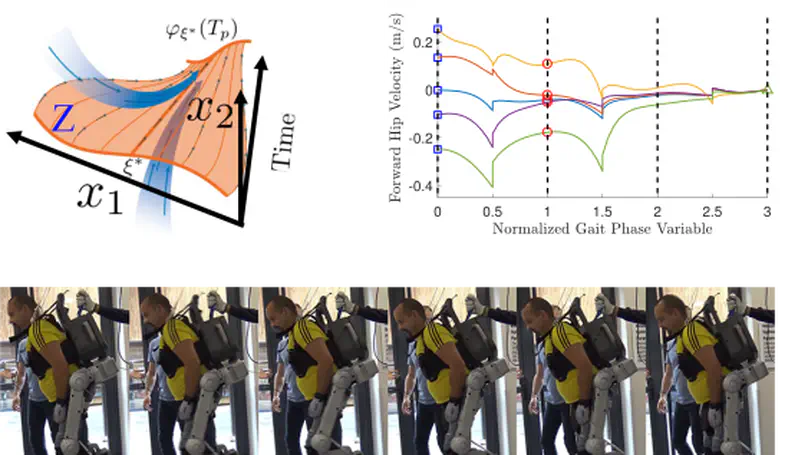
Adaptive feedback regulator for powered lower-limb exoskeleton under model uncertainty.
arXiv preprint arXiv:2104.11775,
2021.
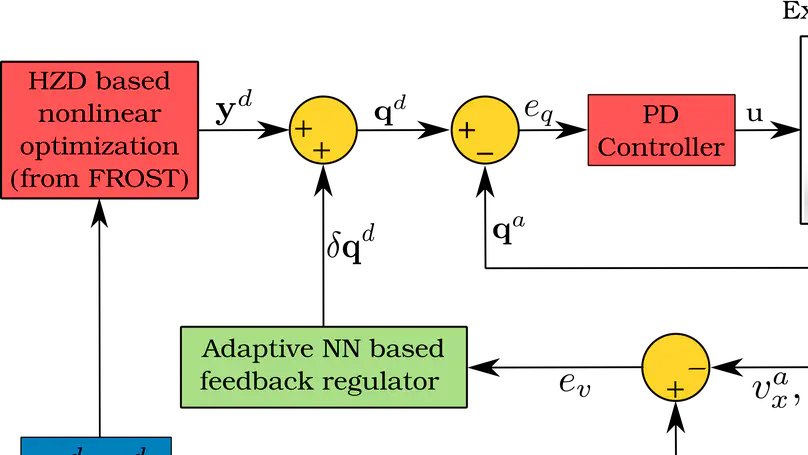
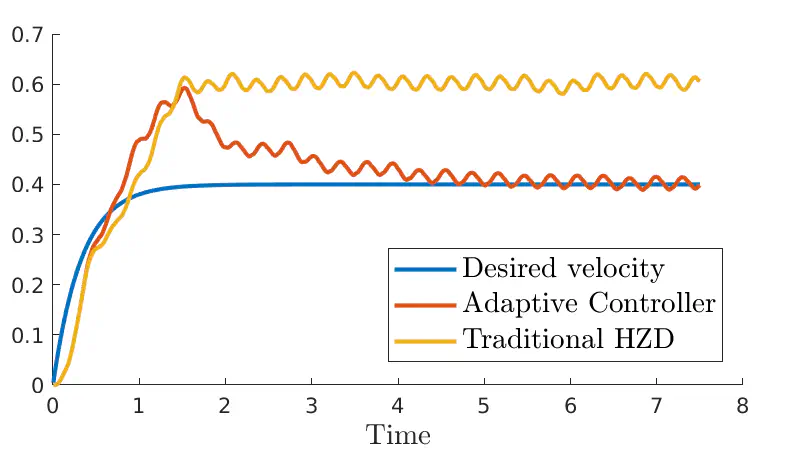
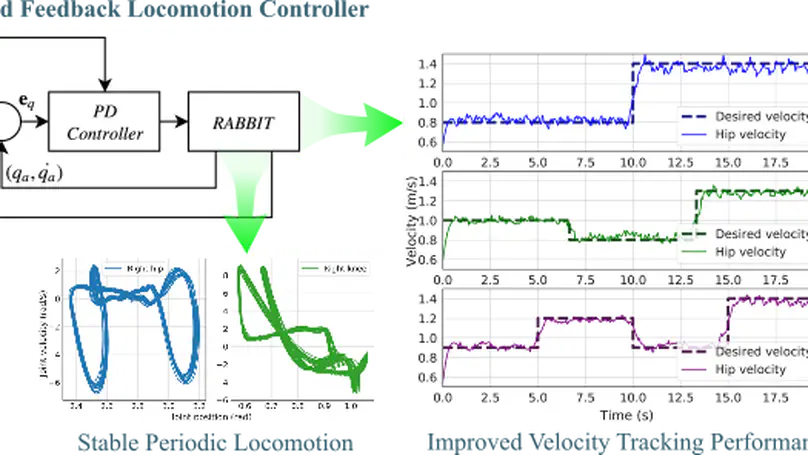
Velocity regulation of 3d bipedal walking robots with uncertain dynamics through adaptive neural network controller.
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2020.

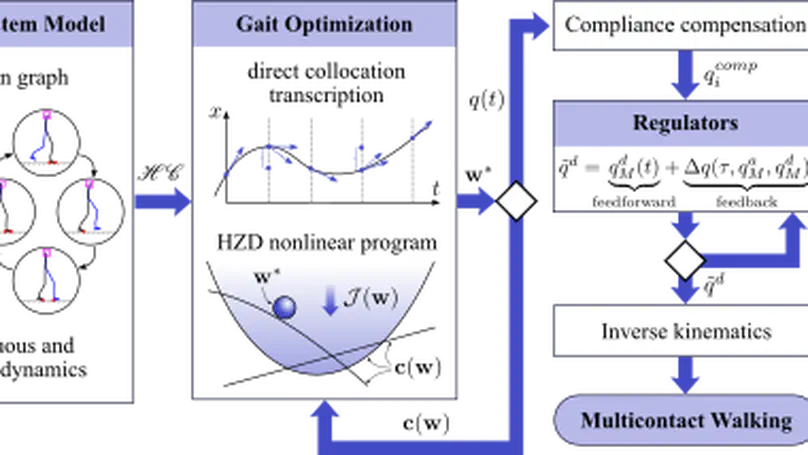
Algorithmic foundations of realizing multi-contact locomotion on the humanoid robot DURUS.
Algorithmic Foundations of Robotics XII: Proceedings of the Twelfth Workshop on the Algorithmic Foundations of Robotics,
2020.

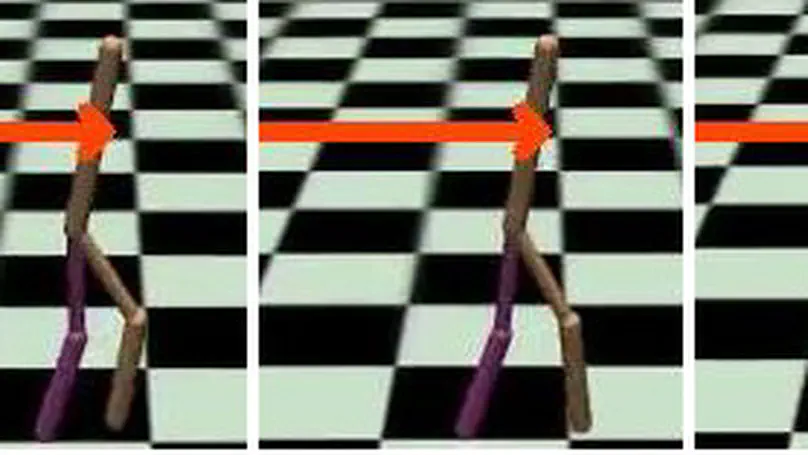
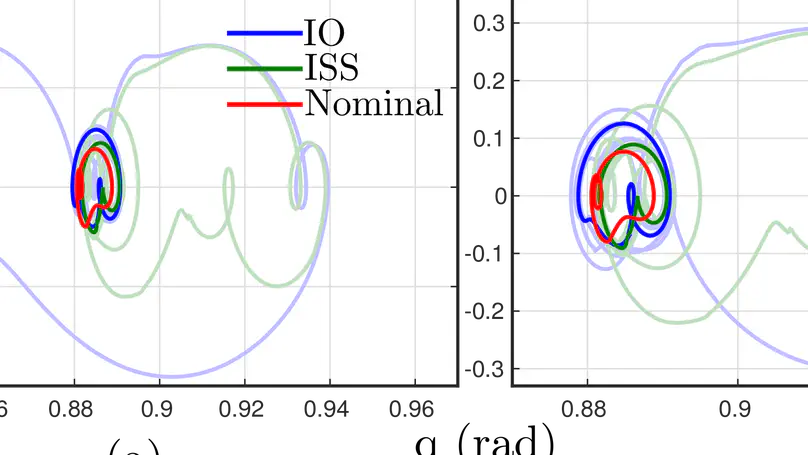
Input to state stabilizing control lyapunov functions for robust bipedal robotic locomotion.
2018 Annual American Control Conference (ACC),
2018.
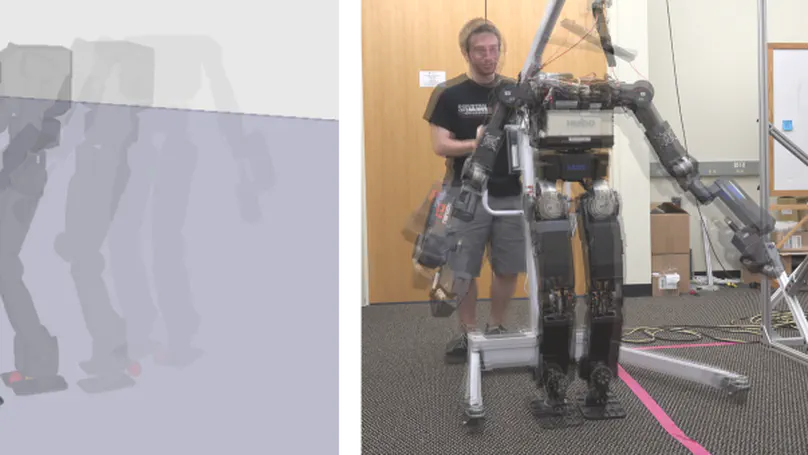
Work those arms: Toward dynamic and stable humanoid walking that optimizes full-body motion.
2016 IEEE International Conference on Robotics and Automation (ICRA),
2016.
Time dependent control Lyapunov functions and hybrid zero dynamics for stable robotic locomotion.
2016 American Control Conference (ACC),
2016.
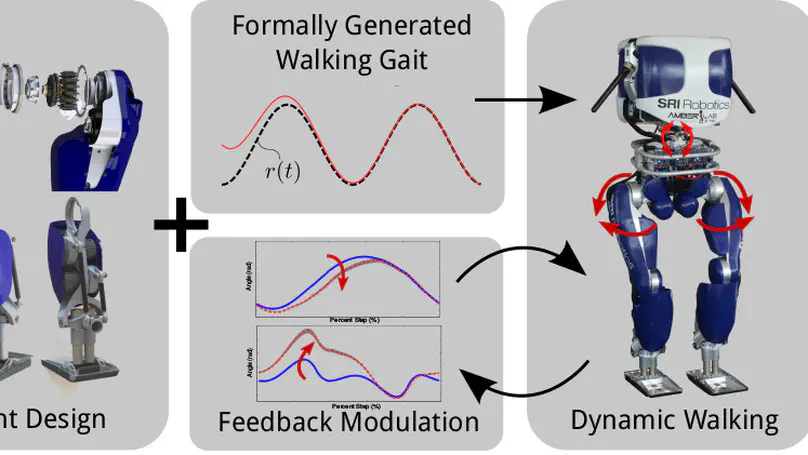
Realizing dynamic and efficient bipedal locomotion on the humanoid robot DURUS.
2016 IEEE International Conference on Robotics and Automation (ICRA),
2016.
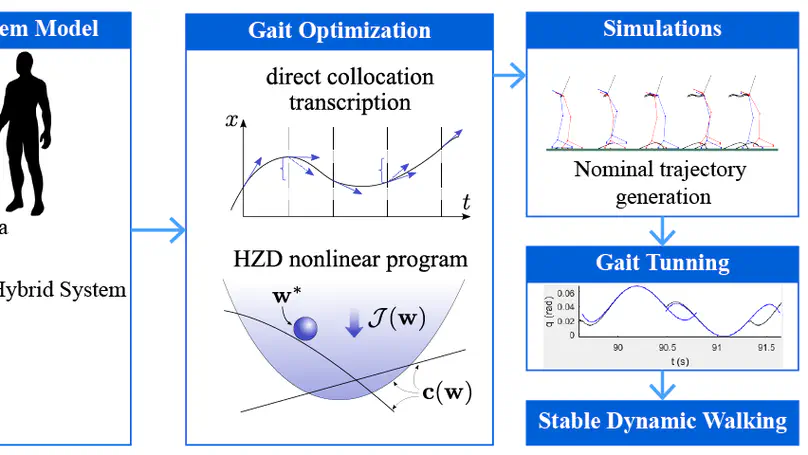
3D multi-contact gait design for prostheses: Hybrid system models, virtual constraints and two-step direct collocation.
2016 IEEE 55th Conference on Decision and Control (CDC),
2016.
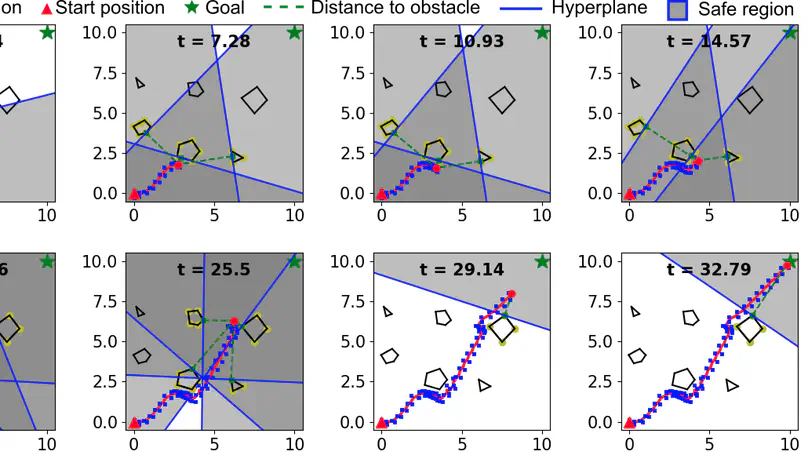
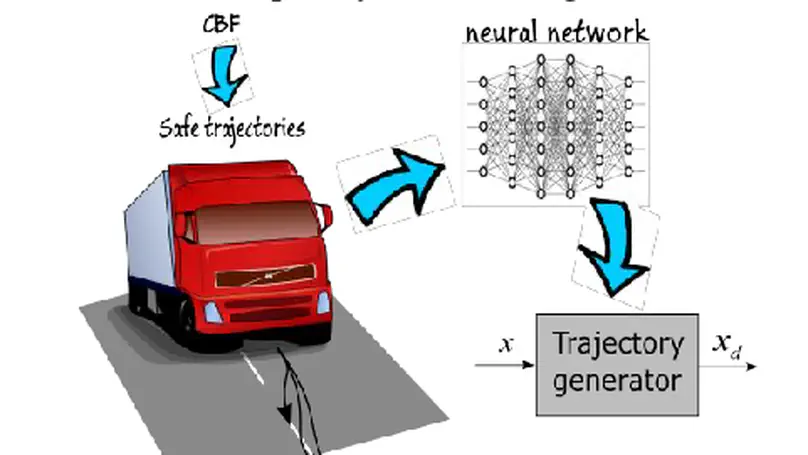
3d dynamic walking on stepping stones with control barrier functions.
2016 IEEE 55th Conference on Decision and Control (CDC),
2016.
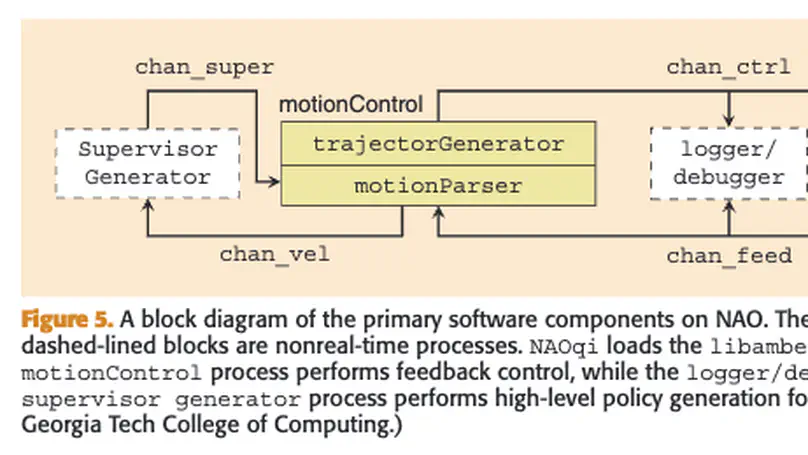
The ach library: a new framework for real-time communication.
IEEE Robotics & Automation Magazine,
2015.
Signal integrity optimization of MLVDS based multi-master instrument bus.
2014 IEEE International Symposium on Electromagnetic Compatibility (EMC),
2014.

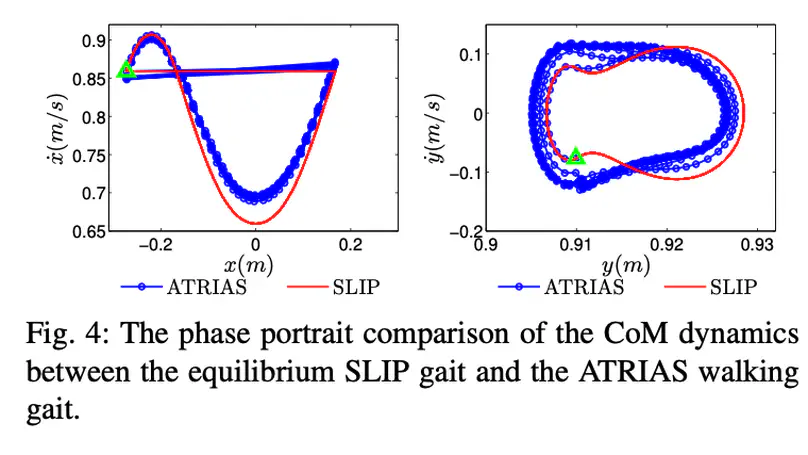
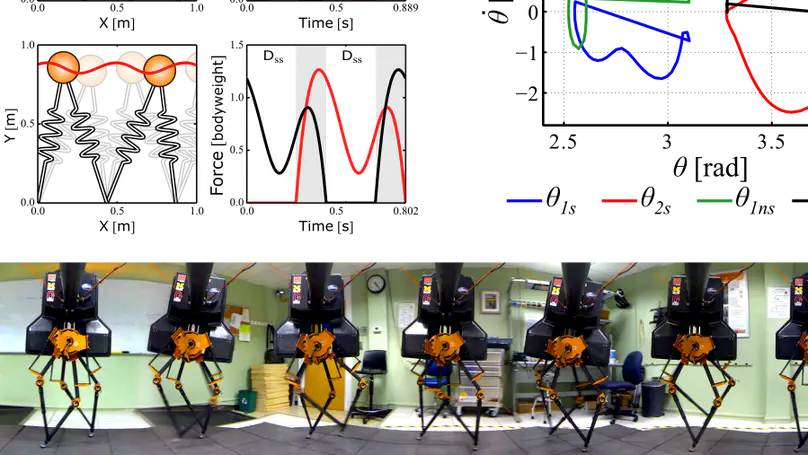
Embedding of slip dynamics on underactuated bipedal robots through multi-objective quadratic program based control.
53rd IEEE Conference on Decision and Control,
2014.
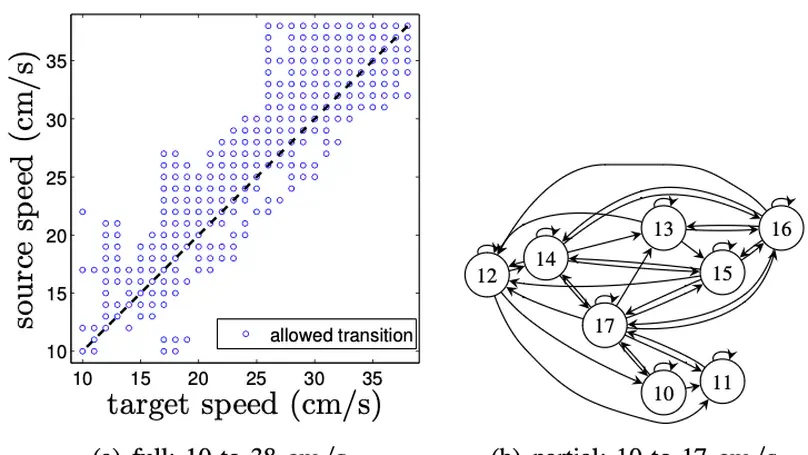
Speed regulation in 3D robotic walking through motion transitions between human-inspired partial hybrid zero dynamics.
2013 IEEE international conference on robotics and automation,
2013.

Correct software synthesis for stable speed-controlled robotic walking.
Robotics: Science and Systems,
2013.