Home
News
People
Projects
Publication
Gallery
Video
Contact
1
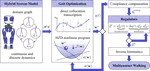
Robust feedback motion policy design using reinforcement learning on a 3d digit bipedal robot
In this paper, a hierarchical and robust framework for learning bipedal locomotion is presented and successfully implemented on the 3D …
Guillermo A Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Dynamic locomotion of a lower-limb exoskeleton through virtual constraints based zmp regulation
Robotic lower-limb exoskeletons have the potentials to assist individuals with paraplegia to perform normal ambulatory functions and to …
Victor Paredes
,
Ayonga Hereid
PDF
Cite
Project
Video
ASME
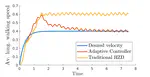
Velocity regulation of 3d bipedal walking robots with uncertain dynamics through adaptive neural network controller
This paper presents a neural-network based adaptive feedback control structure to regulate the velocity of 3D bipedal robots under …
Guillermo A Castillo
,
Bowen Weng
,
Terrence C Stewart
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
IEEE
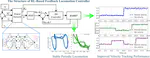
Hybrid zero dynamics inspired feedback control policy design for 3d bipedal locomotion using reinforcement learning
This paper presents a novel model-free reinforcement learning (RL) framework to design feedback control policies for 3D bipedal …
Guillermo A Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Algorithmic foundations of realizing multi-contact locomotion on the humanoid robot DURUS
This paper presents the meta-algorithmic approach used to realize multi-contact walking on the humanoid robot, DURUS. This systematic …
Jacob P Reher
,
Ayonga Hereid
,
Shishir Kolathaya
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Video
Springer
Reinforcement Learning Meets Hybrid Zero Dynamics: A case study for RABBIT
The design of feedback controllers for bipedal robots is challenging due to the hybrid nature of its dynamics and the complexity …
Guillermo A Castillo
,
Bowen Weng
,
Ayonga Hereid
,
Zheng Wang
,
Wei Zhang
PDF
Cite
Project
Video
IEEE
arXiv
Feedback control of a cassie bipedal robot: Walking, standing, and riding a segway
The Cassie bipedal robot designed by Agility Robotics is providing academics with a common platform for sharing and comparing …
Yukai Gong
,
Ross Hartley
,
Xingye Da
,
Ayonga Hereid
,
Omar Harib
,
Jiunn-Kai Huang
,
Jessy Grizzle
PDF
Cite
Code
Video
IEEE
arXiv
Rapid Trajectory Optimization Using C-FROST with Illustration on a Cassie-Series Dynamic Walking Biped
One of the big attractions of low-dimensional models for gait design has been the ability to compute solutions rapidly, whereas one of …
Ayonga Hereid
,
Omar Harib
,
Ross Hartley
,
Yukai Gong
,
Jessy W Grizzle
PDF
Cite
Code
Project
Video
IEEE
arXiv
Input to state stabilizing control lyapunov functions for robust bipedal robotic locomotion
This paper analyzes the input to state stability properties of controllers which stabilize hybrid periodic orbits. Systems that are …
Shishir Kolathaya
,
Jacob Reher
,
Ayonga Hereid
,
Aaron D Ames
PDF
Cite
IEEE
Towards restoring locomotion for paraplegics: Realizing dynamically stable walking on exoskeletons
This paper presents the first experimental results of crutch-less dynamic walking with paraplegics on a lower-body exoskeleton: …
Thomas Gurriet
,
Sylvain Finet
,
Guilhem Boeris
,
Alexis Duburcq
,
Ayonga Hereid
,
Omar Harib
,
Matthieu Masselin
,
Jessy Grizzle
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
«
»
Cite
×