Home
News
People
Projects
Publication
Gallery
Video
Contact
1
FROST*: Fast Robot Optimization and Simulation Toolkit
This paper presents FROST, an open-source MATLAB toolkit for modeling, trajectory optimization and simulation of hybrid dynamical …
Ayonga Hereid
,
Aaron D Ames
PDF
Cite
Code
Project
Video
IEEE
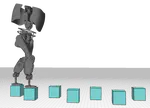
3d dynamic walking on stepping stones with control barrier functions
3D dynamical walking subject to precise footstep placements is crucial for navigating real world terrain with discrete footholds. We …
Quan Nguyen
,
Ayonga Hereid
,
Jessy W Grizzle
,
Aaron D Ames
,
Koushil Sreenath
PDF
Cite
Video
IEEE
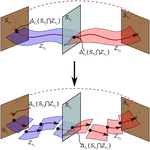
3D dynamic walking with underactuated humanoid robots: A direct collocation framework for optimizing hybrid zero dynamics
Hybrid zero dynamics (HZD) has emerged as a popular framework for dynamic and underactuated bipedal walking, but has significant …
Ayonga Hereid
,
Eric A Cousineau
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
3D multi-contact gait design for prostheses: Hybrid system models, virtual constraints and two-step direct collocation
Virtual constraints have been recognized as an essential bridging tool which has the potential to translate rich nonlinear bipedal …
Huihua Zhao
,
Ayonga Hereid
,
Eric Ambrose
,
Aaron D Ames
PDF
Cite
Project
Video
Efficient HZD gait generation for three-dimensional underactuated humanoid running
Dynamic humanoid locomotion is a challenging control problem, and running is especially difficult to achieve, given the underactuation …
Wen-Loong Ma
,
Ayonga Hereid
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
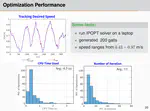
Online optimal gait generation for bipedal walking robots using legendre pseudospectral optimization
This paper presents an optimal gait synthesis method that exploits the full body dynamics of robots using the Hybrid Zero Dynamics …
Ayonga Hereid
,
Shishir Kolathaya
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
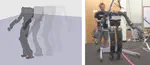
Realizing dynamic and efficient bipedal locomotion on the humanoid robot DURUS
This paper presents the methodology used to achieve efficient and dynamic walking behaviors on the prototype humanoid robotics …
Jacob Reher
,
Eric A Cousineau
,
Ayonga Hereid
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Video
IEEE
Time dependent control Lyapunov functions and hybrid zero dynamics for stable robotic locomotion
Implementing state-based parameterized periodic trajectories on complex robotic systems, e.g., humanoid robots, can lead to instability …
Shishir Kolathaya
,
Ayonga Hereid
,
Aaron D Ames
PDF
Cite
Video
IEEE
Work those arms: Toward dynamic and stable humanoid walking that optimizes full-body motion
Humanoid robots are designed with dozens of actuated joints to suit a variety of tasks, but walking controllers rarely make the best …
Christian M Hubicki
,
Ayonga Hereid
,
Michael X Grey
,
Andrea L Thomaz
,
Aaron D Ames
PDF
Cite
Project
IEEE
Hybrid Zero Dynamics based Multiple Shooting Optimization with Applications to Robotic Walking
Hybrid zero dynamics (HZD) has emerged as a popular framework for the stable control of bipedal robotic gaits, but typically designing …
Ayonga Hereid
,
Christian M Hubicki
,
Eric A Cousineau
,
Jonathan W Hurst
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
«
»
Cite
×