Home
News
People
Projects
Publication
Gallery
Video
Contact
1
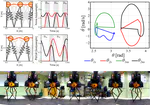
Dynamic multi-domain bipedal walking with atrias through slip based human-inspired control
This paper presents a methodology for achieving efficient multi-domain underactuated bipedal walking on compliant robots by formally …
Ayonga Hereid
,
Shishir Kolathaya
,
Mikhail S Jones
,
Johnathan Van Why
,
Jonathan W Hurst
,
Aaron D Ames
PDF
Cite
Project
Video
ACM
Embedding of slip dynamics on underactuated bipedal robots through multi-objective quadratic program based control
This paper presents a method for achieving stable periodic walking, consisting of phases of single and double support, on underactuated …
Ayonga Hereid
,
Matthew J Powell
,
Aaron D Ames
PDF
Cite
Video
IEEE
Signal integrity optimization of MLVDS based multi-master instrument bus
In this paper, we proposed a MLVDS based multimaster real time instrument bus to simultaneously satisfy the requirement of high speed …
Kaichen Song
,
Caixia Li
,
Lingyun Ye
,
Bin Chen
,
Ayonga Hereid
PDF
Cite
IEEE
Correct software synthesis for stable speed-controlled robotic walking
We present a software synthesis method for speed- controlled robot walking based on supervisory control of a context-free Motion …
Neil Dantam
,
Ayonga Hereid
,
Aaron Ames
,
Mike Stilman
PDF
Cite
Video
Speed regulation in 3D robotic walking through motion transitions between human-inspired partial hybrid zero dynamics
This paper employs the Human-Inspired Control framework in the formal design, optimization and implementation of controllers for 3D …
Matthew J Powell
,
Ayonga Hereid
,
Aaron D Ames
PDF
Cite
Video
IEEE
«
Cite
×