Home
News
People
Projects
Publication
Gallery
Video
Contact
2
On the Comparability and Optimal Aggressiveness of the Adversarial Scenario-Based Safety Testing of Robots
This article studies the class of scenario-based safety testing algorithms in the black-box safety testing configuration. For …
Bowen Weng
,
Guillermo A Castillo
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
IEEE
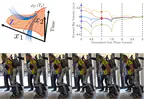
Linear policies are sufficient to realize robust bipedal walking on challenging terrains
In this work, we demonstrate robust walking in the bipedal robot Digit on uneven terrains by just learning a single linear policy. In …
Lokesh Krishna
,
Guillermo A Castillo
,
Utkarsh A Mishra
,
Ayonga Hereid
,
Shishir Kolathaya
PDF
Cite
Video
IEEE
Reinforcement learning-based cascade motion policy design for robust 3D bipedal locomotion
This paper presents a novel reinforcement learning (RL) framework to design cascade feedback control policies for 3D bipedal …
Guillermo A Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Enhancing the performance of a safe controller via supervised learning for truck lateral control
Correct-by-construction techniques, such as control barrier functions (CBFs), can be used to guarantee closed-loop safety by acting as …
Yuxiao Chen
,
Ayonga Hereid
,
Huei Peng
,
Jessy Grizzle
PDF
Cite
Project
arXiv
ASME
Dynamic humanoid locomotion: A scalable formulation for HZD gait optimization
Hybrid zero dynamics (HZD) has emerged as a popular framework for dynamic walking but has significant implementation difficulties when …
Ayonga Hereid
,
Christian M Hubicki
,
Eric A Cousineau
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking
This manuscript presents control of a high-DOF fully actuated lower-limb exoskeleton for paraplegic individuals. The key novelty is the …
Omar Harib
,
Ayonga Hereid
,
Ayush Agrawal
,
Thomas Gurriet
,
Sylvain Finet
,
Guilhem Boeris
,
Alexis Duburcq
,
M Eva Mungai
,
Matthieu Masselin
,
Aaron D Ames
,
others
PDF
Cite
Project
Video
arXiv
IEEE
First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons
This paper presents preliminary results toward translating gait and control design for bipedal robots to decentralized control of an …
Ayush Agrawal
,
Omar Harib
,
Ayonga Hereid
,
Sylvain Finet
,
Matthieu Masselin
,
Laurent Praly
,
Aaron D Ames
,
Koushil Sreenath
,
Jessy W Grizzle
PDF
Cite
Project
Video
IEEE
Multi-contact bipedal robotic locomotion
This paper presents a formal framework for achieving multi-contact bipedal robotic walking, and realizes this methodology …
Huihua Zhao
,
Ayonga Hereid
,
Wen-Loong Ma
,
Aaron D Ames
PDF
Cite
Project
Video
Robotica
The ach library: a new framework for real-time communication
Correct real-time software is vital for robots in safety-critical roles such as service and disaster response. These systems depend on …
Neil T Dantam
,
Daniel M Lofaro
,
Ayonga Hereid
,
Paul Y Oh
,
Aaron D Ames
,
Mike Stilman
PDF
Cite
IEEE
Cite
×