Home
News
People
Projects
Publication
Gallery
Video
Contact
3
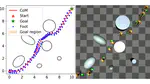
Adaptive Step Duration for Precise Foot Placement: Achieving Robust Bipedal Locomotion on Terrains with Restricted Footholds
Traditional one-step preview planning algorithms for bipedal locomotion struggle to generate viable gaits when walking across terrains …
Zhaoyang Xiang
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
Real-Time Safe Bipedal Robot Navigation using Linear Discrete Control Barrier Functions
Safe navigation in real-time is an essential task for humanoid robots in real-world deployment. Since humanoid robots are inherently …
Chengyang Peng
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
Unified Path and Gait Planning for Safe Bipedal Robot Navigation
Safe path and gait planning are essential for bipedal robots to navigate complex real-world environments. The prevailing approaches …
Chengyang Peng
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller …
Yuan Gao
,
Victor Paredes
,
Yukai Gong
,
Zijian He
,
Ayonga Hereid
,
Yan Gu
PDF
Cite
Project
Video
arXiv
Real-Time Navigation for Bipedal Robots in Dynamic Environments
The popularity of mobile robots has been steadily growing, with these robots being increasingly utilized to execute tasks previously …
Octavian Donca
,
Chayapol Beokhaimook
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
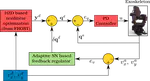
Adaptive feedback regulator for powered lower-limb exoskeleton under model uncertainty
This paper presents a neural network (NN) based adaptive feedback regulator to ensure the lateral and longitudinal stability and …
Kirtankumar Thakkar
,
Victor Paredes
,
Ayonga Hereid
PDF
Cite
Project
arXiv
Cite
×