Enhancing the performance of a safe controller via supervised learning for truck lateral control
Abstract
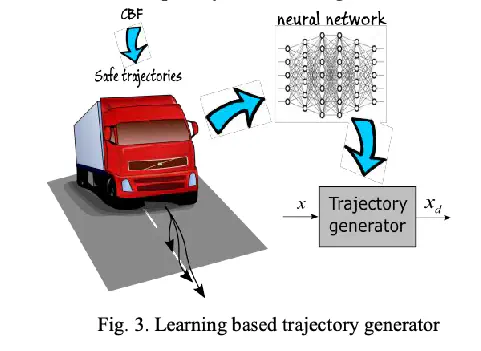
Correct-by-construction techniques, such as control barrier functions (CBFs), can be used to guarantee closed-loop safety by acting as a supervisor of an existing legacy controller. However, supervisory-control intervention typically compromises the performance of the closed-loop system. On the other hand, machine learning has been used to synthesize controllers that inherit good properties from a training dataset, though safety is typically not guaranteed due to the difficulty of analyzing the associated learning structure. In this paper, supervised learning is combined with CBFs to synthesize controllers that enjoy good performance with provable safety. A training set is generated by trajectory optimization that incorporates the CBF constraint for an interesting range of initial conditions of the truck model. A control policy is obtained via supervised learning that maps a feature representing the initial conditions to a parameterized desired trajectory. The learning-based controller is used as the performance controller and a CBF-based supervisory controller guarantees safety. A case study of lane keeping (LK) for articulated trucks shows that the controller trained by supervised learning inherits the good performance of the training set and rarely requires intervention by the CBF supervisor.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.