Towards restoring locomotion for paraplegics: Realizing dynamically stable walking on exoskeletons
Abstract
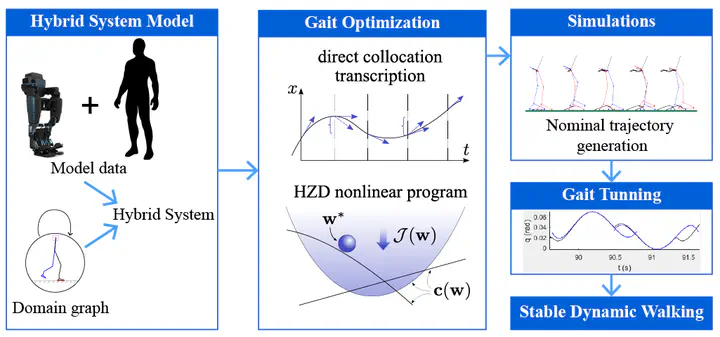
This paper presents the first experimental results of crutch-less dynamic walking with paraplegics on a lower-body exoskeleton: ATALANTE, designed by the French start-up company Wandercraft. The methodology used to achieve these results is based on the partial hybrid zero dynamics (PHZD) framework for formally generating stable walking gaits. A direct collocation optimization formulation is used to provide fast and efficient generation of gaits tailored to each patient. These gaits are then implemented on the exoskeleton for three paraplegics. The end result is dynamically stable walking in an exoskeleton without the need for crutches. After a short period of tuning by the engineers and practice by the subjects, each subject was able to dynamically walk across a room of about 10 m up to a speed of 0.15 m/s (0.5 km/h) without the need for crutches or any other kind of assistance.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.