Dynamic multi-domain bipedal walking with atrias through slip based human-inspired control
Abstract
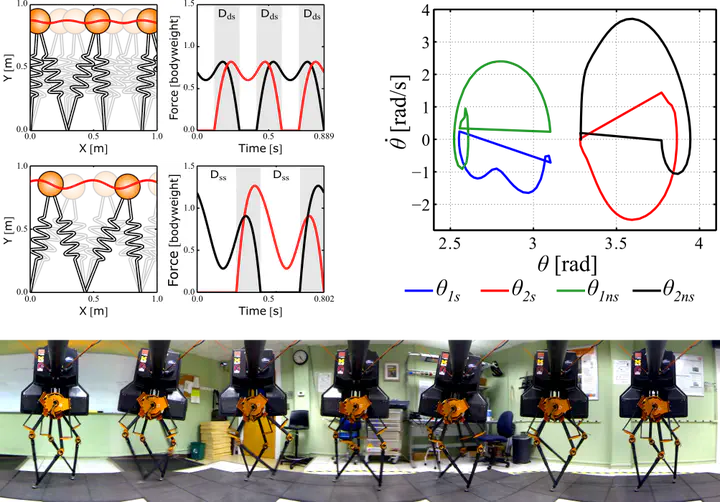
This paper presents a methodology for achieving efficient multi-domain underactuated bipedal walking on compliant robots by formally emulating gaits produced by the Spring Loaded Inverted Pendulum (SLIP). With the goal of achieving locomotion that displays phases of double and single support, a hybrid system model is formulated that faithfully represents the full-order dynamics of a compliant walking robot. The SLIP model is used as a bases for constructing human-inspired controllers that yield a dimension reduction through the use of hybrid zero dynamics. This allows for the formulation of an optimization problem that produces hybrid zero dynamics that best represents a SLIP model walking gait, while simultaneously ensuring the proper reduction in dimensionality that can be utilized to produce stable periodic orbits, i.e., walking gaits. The end result is stable robotic walking in simulation and, when implemented on the compliant robot ATRIAS, experimentally realized dynamic multi-domain locomotion.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.