Online optimal gait generation for bipedal walking robots using legendre pseudospectral optimization
Abstract
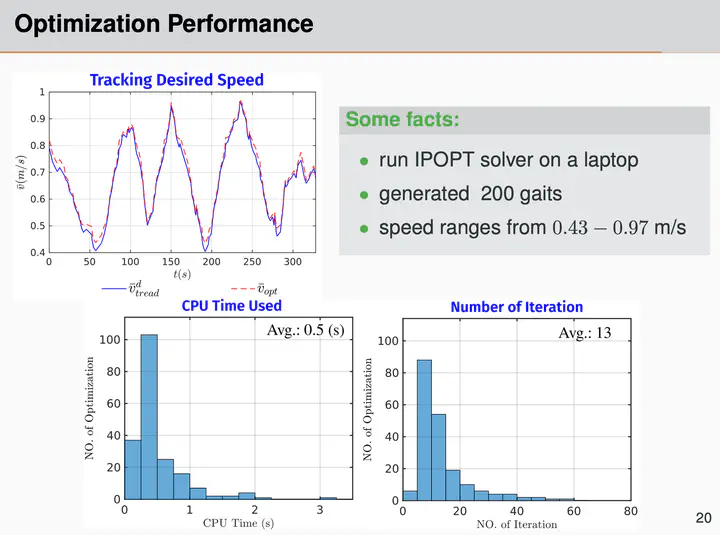
This paper presents an optimal gait synthesis method that exploits the full body dynamics of robots using the Hybrid Zero Dynamics (HZD) control framework and-for the first time-experimentally realizes online HZD gait generation for a planar underactuated robot. Hybrid zero dynamics is an established theoretical framework that formally enables stable control of dynamic locomotion by enforcing virtual constraints through feedback controllers. An essential part of successfully realizing dynamic walking with HZD framework is determining parameters of the virtual constraints that satisfy hybrid invariant condition via nonlinear constrained optimization. Due to the complexity of the full hybrid system model of the robot, these optimization problems often suffer from slow convergence and local minima. In this paper, we improve the reliability of the HZD gait optimization and significantly increase the convergence speed by taking advantage of the direct transcription formulation and the exponential convergence of the global orthogonal collocation (a.k.a. pseudospectral) method. As a result, generating HZD gaits online becomes feasible with an average computation time less than 0.5 seconds, as will be demonstrated experimentally on a bipedal robot.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.