Dynamic humanoid locomotion: A scalable formulation for HZD gait optimization
Abstract
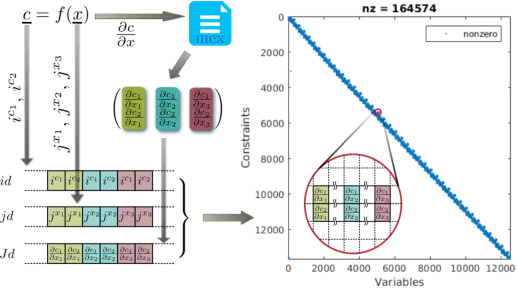
Hybrid zero dynamics (HZD) has emerged as a popular framework for dynamic walking but has significant implementation difficulties when applied to the high degrees of freedom humanoids. The primary impediment is the process of gait design-it is difficult for optimizers to converge on a viable set of virtual constraints defining a gait. This paper presents a methodology that allows for fast and reliable generation of dynamic robotic walking gaits through the HZD framework, even in the presence of underactuation. Specifically, we describe an optimization formulation that builds upon the novel combination of HZD and direct collocation methods. Furthermore, achieving a scalable implementation required developing a defect-variable substitution formulation to simplify expressions, which ultimately allows us to generate compact analytic Jacobians of the constraints. We experimentally validate our methodology on an underactuated humanoid, DURUS, a spring-legged machine designed to facilitate energy-economical walking. We show that the optimization approach, in concert with the HZD framework, yields dynamic and stable walking gaits in hardware with a total electrical cost of transport of 1.33.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.