Work those arms: Toward dynamic and stable humanoid walking that optimizes full-body motion
Abstract
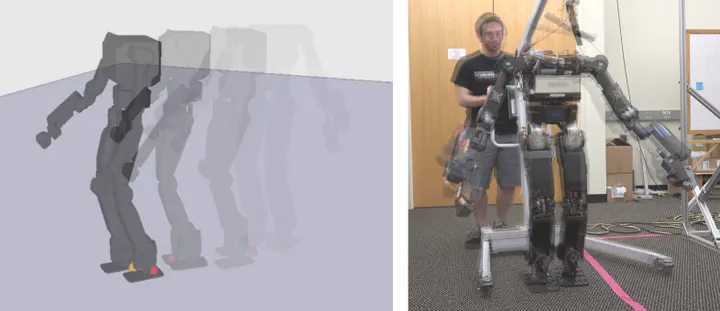
Humanoid robots are designed with dozens of actuated joints to suit a variety of tasks, but walking controllers rarely make the best use of all of this freedom. We present a framework for maximizing the use of the full humanoid body for the purpose of stable dynamic locomotion, which requires no restriction to a planning template (e.g. LIPM). Using a hybrid zero dynamics (HZD) framework, this approach optimizes a set of outputs which provides requirements for the motion for all actuated links, including arms. These output equations are then rapidly solved by a whole-body inverse-kinematic (IK) solver, providing a set of joint trajectories to the robot. We apply this procedure to a simulation of the humanoid robot, DRC-HUBO, which has over 27 actuators. As a consequence, the resulting gaits swing their arms, not by a user defining swinging motions a priori or superimposing them on gaits post hoc, but as an emergent behavior from optimizing the dynamic gait. We also present preliminary dynamic walking experiments with DRC-HUBO in hardware, thereby building a case that hybrid zero dynamics as augmented by inverse kinematics (HZD+IK) is becoming a viable approach for controlling the full complexity of humanoid locomotion.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.