Efficient HZD gait generation for three-dimensional underactuated humanoid running
Abstract
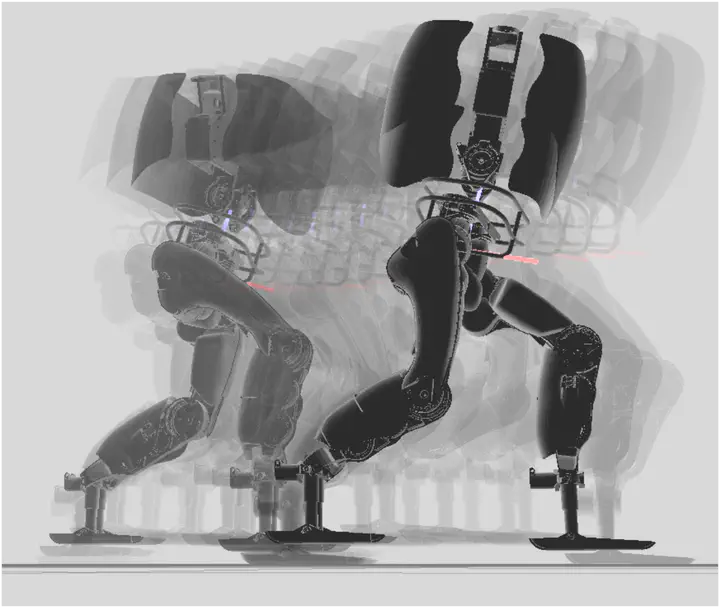
Dynamic humanoid locomotion is a challenging control problem, and running is especially difficult to achieve, given the underactuation inherent to aerial domains. Previous work developed a gait-generating optimization framework for dynamic locomotion in the context of hybrid zero dynamics, producing stable 3D walking on the humanoid hardware platform DURUS. Here, we demonstrate that this optimization method also extends to stable 3D running. Gaits generated from the optimization, which utilizes the dynamics of all 23 degrees of freedom to maximize energy economy, results in stable running in a DURUS simulation model. Notably, the presented running is underactuated in all domains, due to DURUS spring-legged design. Further, we generate 25 different running gaits, over a range of speeds (1.5-3.0 m/s), to demonstrate the reliability of solving the large-scale nonlinear program. We report statistical performance of the optimization in successfully generating stable running (average computation time: 323 seconds) in an effort to establish a benchmark for large-scale gait generation. We inspected this array of gaits across speeds, noting recognizable trends in optimized strategies from prior studies on lower-order models-e.g., both increased step frequency and step length with speed-along with the first reported cost-of-transport curve for a 3D humanoid running model. We consider this result an important step toward humanoid running on the DURUS hardware platform.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.