Abstract
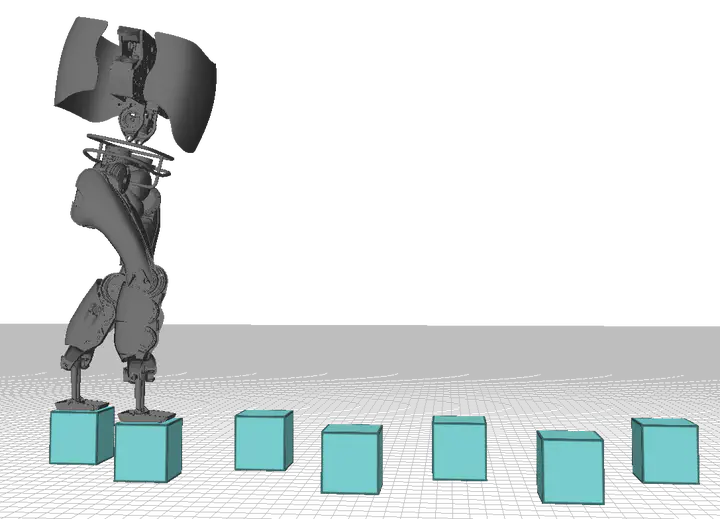
3D dynamical walking subject to precise footstep placements is crucial for navigating real world terrain with discrete footholds. We present a novel methodology that combines control Lyapunov functions-to achieve periodic walking-and control Barrier functions-to enforce strict constraints on step length and step width-unified in a single optimization-based controller. We numerically validate our proposed method by demonstrating dynamic 3D walking at 0.6 m/s on DURUS, a 23 degree-of-freedom underactuated humanoid robot.
Type
Publication
2016 IEEE 55th Conference on Decision and Control (CDC)
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.