Real-Time Safe Bipedal Robot Navigation using Linear Discrete Control Barrier Functions
Abstract
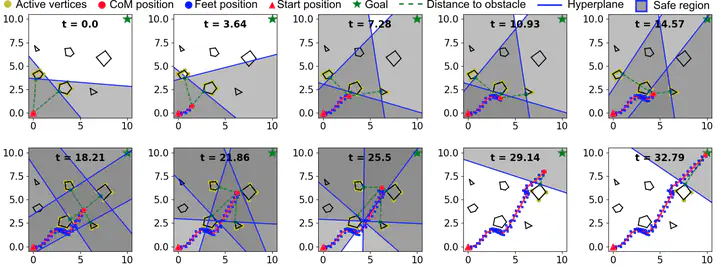
Safe navigation in real-time is an essential task for humanoid robots in real-world deployment. Since humanoid robots are inherently underactuated thanks to unilateral ground contacts, a path is considered safe if it is obstacle-free and respects the robot’s physical limitations and underlying dynamics. Existing approaches often decouple path planning from gait control due to the significant computational challenge caused by the full-order robot dynamics. In this work, we develop a unified, safe path and gait planning framework that can be evaluated online in real-time, allowing the robot to navigate clustered environments while sustaining stable locomotion. Our approach uses the popular Linear Inverted Pendulum (LIP) model as a template model to represent walking dynamics. It incorporates heading angles in the model to evaluate kinematic constraints essential for physically feasible gaits properly. In addition, we leverage discrete control barrier functions (DCBF) for obstacle avoidance, ensuring that the subsequent foot placement provides a safe navigation path within clustered environments. To guarantee real-time computation, we use a novel approximation of the DCBF to produce linear DCBF (LDCBF) constraints. We validate the proposed approach in simulation using a Digit robot in randomly generated environments. The results demonstrate that our approach can generate safe gaits for a non-trivial humanoid robot to navigate environments with randomly generated obstacles in real-time.
Chengyang Peng
Ph.D. Candidate
My research interests include bipedal robotic walking, motion and path planning, and control barrier functions.
Victor Paredes
Ph.D. in Mechanical Engineering
I am a robotics engineer at UCR. My research endeavors are centered upon humanoids and exoskeleton devices.
Guillermo A Castillo
Ph.D. in Electrical and Computer Engineering
I am a robotics engineer at Apptronik.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.