Abstract
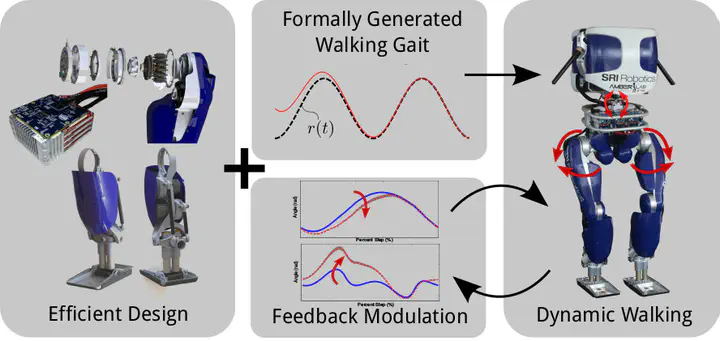
This paper presents the methodology used to achieve efficient and dynamic walking behaviors on the prototype humanoid robotics platform, DURUS. As a means of providing a hardware platform capable of these behaviors, the design of DURUS combines highly efficient electromechanical components with “control in the loop” design of the leg morphology. Utilizing the final design of DURUS, a formal framework for the generation of dynamic walking gaits which maximizes efficiency by exploiting the full body dynamics of the robot, including the interplay between the passive and active elements, is developed. The gaits generated through this methodology form the basis of the control implementation experimentally realized on DURUS; in particular, the trajectories generated through the formal framework yield a feedforward control input which is modulated by feedback in the form of regulators that compensate for discrepancies between the model and physical system. The end result of the unified approach to control-informed mechanical design, formal gait design and regulator-based feedback control implementation is efficient and dynamic locomotion on the humanoid robot DURUS. In particular, DURUS was able to demonstrate dynamic locomotion at the DRC Finals Endurance Test, walking for just under five hours in a single day, traveling 3.9 km with a mean cost of transport of 1.61-the lowest reported cost of transport achieved on a bipedal humanoid robot.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.