Algorithmic foundations of realizing multi-contact locomotion on the humanoid robot DURUS
Abstract
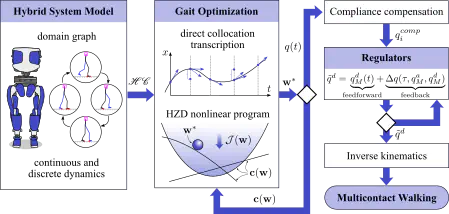
This paper presents the meta-algorithmic approach used to realize multi-contact walking on the humanoid robot, DURUS. This systematic methodology begins by decomposing human walking into a sequence of distinct events (e.g. heel-strike, toe-strike, and toe push-off). These events are converted into an alternating sequence of domains and guards, resulting in a hybrid system model of the locomotion. Through the use of a direct collocation based optimization framework, a walking gait is generated for the hybrid system model emulating human-like multi-contact walking behaviors – additional constraints are iteratively added and shaped from experimental evaluation to reflect the machine’s practical limitations. The synthesized gait is analyzed directly on hardware wherein feedback regulators are introduced which stabilize the walking gait, e.g., modulating foot placement. The end result is an energyoptimized walking gait that is physically implementable on hardware. The novelty of this work lies in the creation of a systematic approach for developing dynamic walking gaits on 3D humanoid robots: from formulating the hybrid system model to gait optimization to experimental validation refined to produce multi-contact 3D walking in experiment.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.