Towards Standardized Disturbance Rejection Testing of Legged Robot Locomotion with Linear Impactor: A Preliminary Study, Observations, and Implications
Abstract
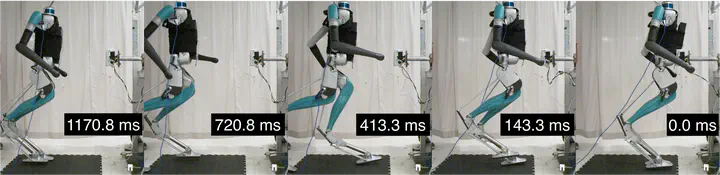
Dynamic locomotion in legged robots is close to industrial collaboration, but a lack of standardized testing obstructs commercialization. The issues are not merely political, theoretical, or algorithmic but also physical, indicating limited studies and comprehension regarding standard testing infrastructure and equipment. For decades, the approaches we have been testing legged robots were rarely standardizable with hand-pushing, foot-kicking, rope-dragging, stick-poking, and ball-swinging. This paper aims to bridge the gap by proposing the use of the linear impactor, a well-established tool in other standardized testing disciplines, to serve as an adaptive, repeatable, and fair disturbance rejection testing equipment for legged robots. A pneumatic linear impactor is also adopted for the case study involving the humanoid robot Digit. Three locomotion controllers are examined, including a commercial one, using a walking-in-place task against frontal impacts. The statistically best controller was able to withstand the impact momentum (26.376 kgm/s) on par with a reported average effective momentum from straight punches by Olympic boxers (26.506 kgm/s). Moreover, the case study highlights other anti-intuitive observations, demonstrations, and implications that, to the best of the authors’ knowledge, are first-of-its-kind revealed in real-world testing of legged robots.
Guillermo A Castillo
Ph.D. in Electrical and Computer Engineering
I am a robotics engineer at Apptronik.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.