Abstract
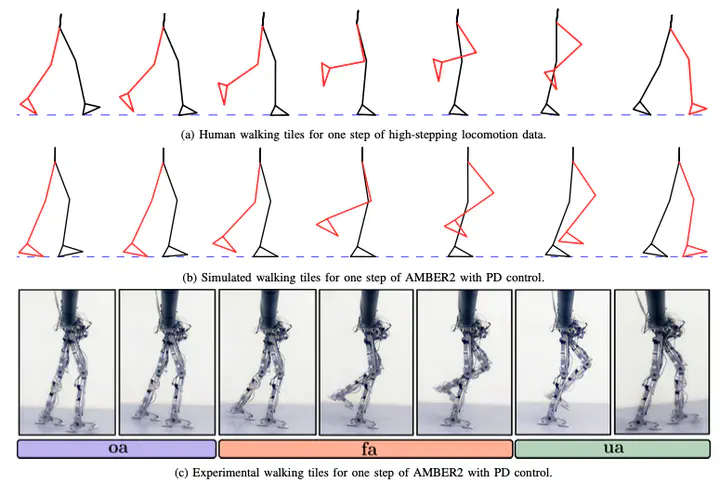
This paper presents a formal framework for achieving multi-contact bipedal robotic walking, and realizes this methodology experimentally on two robotic platforms: AMBER2 and Assume The Robot Is A Sphere (ATRIAS). Inspired by the key feature encoded in human walking—multi-contact behavior—this approach begins with the analysis of human locomotion and uses it to motivate the construction of a hybrid system model representing a multi-contact robotic walking gait. Human-inspired outputs are extracted from reference locomotion data to characterize the human model or the spring-loaded invert pendulum (SLIP) model, and then employed to develop the human-inspired control and an optimization problem that yields stable multi-domain walking. Through a trajectory reconstruction strategy motivated by the process that generates the walking gait, the mathematical constructions are successfully translated to the two physical robots experimentally.
Ayonga Hereid
Assistant Professor of Mechanical Engineering
My research aims to develop computational and theoretical tools to mitigate the high dimensionality and nonlinearity present in robot control and motion planning problems.