Home
News
People
Projects
Publication
Gallery
Video
Contact
adaptive learning
Resolved motion control for 3d underactuated bipedal walking using linear inverted pendulum dynamics and neural adaptation
We present a framework to generate periodic trajectory references for a 3D under-actuated bipedal robot, using a linear inverted …
Victor C Paredes
,
Ayonga Hereid
PDF
Cite
Video
IEEE
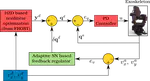
Adaptive feedback regulator for powered lower-limb exoskeleton under model uncertainty
This paper presents a neural network (NN) based adaptive feedback regulator to ensure the lateral and longitudinal stability and …
Kirtankumar Thakkar
,
Victor Paredes
,
Ayonga Hereid
PDF
Cite
Project
arXiv
Cite
×