Home
News
People
Projects
Publication
Gallery
Video
Contact
adaptive planning
Adaptive Step Duration for Precise Foot Placement: Achieving Robust Bipedal Locomotion on Terrains with Restricted Footholds
Traditional one-step preview planning algorithms for bipedal locomotion struggle to generate viable gaits when walking across terrains …
Zhaoyang Xiang
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
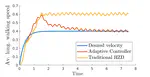
Velocity regulation of 3d bipedal walking robots with uncertain dynamics through adaptive neural network controller
This paper presents a neural-network based adaptive feedback control structure to regulate the velocity of 3D bipedal robots under …
Guillermo A Castillo
,
Bowen Weng
,
Terrence C Stewart
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
IEEE
Cite
×