Home
News
People
Projects
Publication
Gallery
Video
Contact
atalante
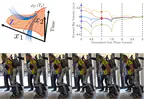
Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking
This manuscript presents control of a high-DOF fully actuated lower-limb exoskeleton for paraplegic individuals. The key novelty is the …
Omar Harib
,
Ayonga Hereid
,
Ayush Agrawal
,
Thomas Gurriet
,
Sylvain Finet
,
Guilhem Boeris
,
Alexis Duburcq
,
M Eva Mungai
,
Matthieu Masselin
,
Aaron D Ames
,
others
PDF
Cite
Project
Video
arXiv
IEEE
Towards restoring locomotion for paraplegics: Realizing dynamically stable walking on exoskeletons
This paper presents the first experimental results of crutch-less dynamic walking with paraplegics on a lower-body exoskeleton: …
Thomas Gurriet
,
Sylvain Finet
,
Guilhem Boeris
,
Alexis Duburcq
,
Ayonga Hereid
,
Omar Harib
,
Matthieu Masselin
,
Jessy Grizzle
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons
This paper presents preliminary results toward translating gait and control design for bipedal robots to decentralized control of an …
Ayush Agrawal
,
Omar Harib
,
Ayonga Hereid
,
Sylvain Finet
,
Matthieu Masselin
,
Laurent Praly
,
Aaron D Ames
,
Koushil Sreenath
,
Jessy W Grizzle
PDF
Cite
Project
Video
IEEE
Cite
×