Home
News
People
Projects
Publication
Gallery
Video
Contact
control barrier function
Safe Whole-Body Task Space Control for Humanoid Robots
Complex robotic systems require whole-body controllers to handle contact interactions, handle closed kinematic chains, and track …
Victor Paredes
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Real-Time Safe Bipedal Robot Navigation using Linear Discrete Control Barrier Functions
Safe navigation in real-time is an essential task for humanoid robots in real-world deployment. Since humanoid robots are inherently …
Chengyang Peng
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
Unified Path and Gait Planning for Safe Bipedal Robot Navigation
Safe path and gait planning are essential for bipedal robots to navigate complex real-world environments. The prevailing approaches …
Chengyang Peng
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
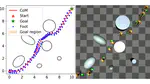
Safe Bipedal Path Planning via Control Barrier Functions for Polynomial Shape Obstacles Estimated Using Logistic Regression
Safe path planning is critical for bipedal robots to operate in safety-critical environments. Common path planning algorithms, such as …
Chengyang Peng
,
Octavian Donca
,
Guillermo Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Enhancing the performance of a safe controller via supervised learning for truck lateral control
Correct-by-construction techniques, such as control barrier functions (CBFs), can be used to guarantee closed-loop safety by acting as …
Yuxiao Chen
,
Ayonga Hereid
,
Huei Peng
,
Jessy Grizzle
PDF
Cite
Project
arXiv
ASME
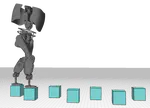
3d dynamic walking on stepping stones with control barrier functions
3D dynamical walking subject to precise footstep placements is crucial for navigating real world terrain with discrete footholds. We …
Quan Nguyen
,
Ayonga Hereid
,
Jessy W Grizzle
,
Aaron D Ames
,
Koushil Sreenath
PDF
Cite
Video
IEEE
Cite
×