Home
News
People
Projects
Publication
Gallery
Video
Contact
direct collocation
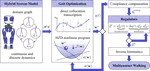
Algorithmic foundations of realizing multi-contact locomotion on the humanoid robot DURUS
This paper presents the meta-algorithmic approach used to realize multi-contact walking on the humanoid robot, DURUS. This systematic …
Jacob P Reher
,
Ayonga Hereid
,
Shishir Kolathaya
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Video
Springer
Dynamic humanoid locomotion: A scalable formulation for HZD gait optimization
Hybrid zero dynamics (HZD) has emerged as a popular framework for dynamic walking but has significant implementation difficulties when …
Ayonga Hereid
,
Christian M Hubicki
,
Eric A Cousineau
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
3D dynamic walking with underactuated humanoid robots: A direct collocation framework for optimizing hybrid zero dynamics
Hybrid zero dynamics (HZD) has emerged as a popular framework for dynamic and underactuated bipedal walking, but has significant …
Ayonga Hereid
,
Eric A Cousineau
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
3D multi-contact gait design for prostheses: Hybrid system models, virtual constraints and two-step direct collocation
Virtual constraints have been recognized as an essential bridging tool which has the potential to translate rich nonlinear bipedal …
Huihua Zhao
,
Ayonga Hereid
,
Eric Ambrose
,
Aaron D Ames
PDF
Cite
Project
Video
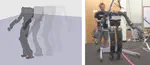
Efficient HZD gait generation for three-dimensional underactuated humanoid running
Dynamic humanoid locomotion is a challenging control problem, and running is especially difficult to achieve, given the underactuation …
Wen-Loong Ma
,
Ayonga Hereid
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
Work those arms: Toward dynamic and stable humanoid walking that optimizes full-body motion
Humanoid robots are designed with dozens of actuated joints to suit a variety of tasks, but walking controllers rarely make the best …
Christian M Hubicki
,
Ayonga Hereid
,
Michael X Grey
,
Andrea L Thomaz
,
Aaron D Ames
PDF
Cite
Project
IEEE
Cite
×