Home
News
People
Projects
Publication
Gallery
Video
Contact
exoskeleton
Moving past point-contacts: Extending the ALIP model to humanoids with non-trivial feet using hierarchical, full-body momentum control
The Angular-Momentum Linear Inverted Pendulum (ALIP) model is a promising motion planner for bipedal robots. However, it relies on two …
Victor Paredes
,
Daniel Hagen
,
Samual Chesebrough
,
Riley Swann
,
Denis Garagic
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Hierarchical Reinforcement Learning (HRL) for Safe Dynamic Legged Locomotion
Our research project aims to advance the capabilities of legged robots via novel Hierarchical Reinforcement Learning (HRL) algorithms, enabling them to achieve efficient and adaptive locomotion in complex environments.
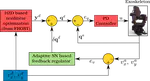
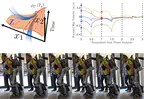
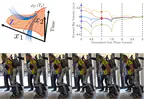
Adaptive feedback regulator for powered lower-limb exoskeleton under model uncertainty
This paper presents a neural network (NN) based adaptive feedback regulator to ensure the lateral and longitudinal stability and …
Kirtankumar Thakkar
,
Victor Paredes
,
Ayonga Hereid
PDF
Cite
Project
arXiv
Dynamic Locomotion Control for Self-Balancing Lower-Limb Exoskeletons
We strive to advancing the field of lower-limb exoskeletons and developing innovative solutions to enhance mobility and independence for individuals with paraplegia.
Dynamic locomotion of a lower-limb exoskeleton through virtual constraints based zmp regulation
Robotic lower-limb exoskeletons have the potentials to assist individuals with paraplegia to perform normal ambulatory functions and to …
Victor Paredes
,
Ayonga Hereid
PDF
Cite
Project
Video
ASME
Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking
This manuscript presents control of a high-DOF fully actuated lower-limb exoskeleton for paraplegic individuals. The key novelty is the …
Omar Harib
,
Ayonga Hereid
,
Ayush Agrawal
,
Thomas Gurriet
,
Sylvain Finet
,
Guilhem Boeris
,
Alexis Duburcq
,
M Eva Mungai
,
Matthieu Masselin
,
Aaron D Ames
,
others
PDF
Cite
Project
Video
arXiv
IEEE
Towards restoring locomotion for paraplegics: Realizing dynamically stable walking on exoskeletons
This paper presents the first experimental results of crutch-less dynamic walking with paraplegics on a lower-body exoskeleton: …
Thomas Gurriet
,
Sylvain Finet
,
Guilhem Boeris
,
Alexis Duburcq
,
Ayonga Hereid
,
Omar Harib
,
Matthieu Masselin
,
Jessy Grizzle
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons
This paper presents preliminary results toward translating gait and control design for bipedal robots to decentralized control of an …
Ayush Agrawal
,
Omar Harib
,
Ayonga Hereid
,
Sylvain Finet
,
Matthieu Masselin
,
Laurent Praly
,
Aaron D Ames
,
Koushil Sreenath
,
Jessy W Grizzle
PDF
Cite
Project
Video
IEEE
Cite
×