Home
News
People
Projects
Publication
Gallery
Video
Contact
human-like locomtion
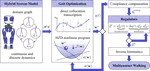
Algorithmic foundations of realizing multi-contact locomotion on the humanoid robot DURUS
This paper presents the meta-algorithmic approach used to realize multi-contact walking on the humanoid robot, DURUS. This systematic …
Jacob P Reher
,
Ayonga Hereid
,
Shishir Kolathaya
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Video
Springer
Cite
×