Home
News
People
Projects
Publication
Gallery
Video
Contact
hybrid zero dynamics
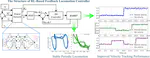
Hybrid zero dynamics inspired feedback control policy design for 3d bipedal locomotion using reinforcement learning
This paper presents a novel model-free reinforcement learning (RL) framework to design feedback control policies for 3D bipedal …
Guillermo A Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Reinforcement Learning Meets Hybrid Zero Dynamics: A case study for RABBIT
The design of feedback controllers for bipedal robots is challenging due to the hybrid nature of its dynamics and the complexity …
Guillermo A Castillo
,
Bowen Weng
,
Ayonga Hereid
,
Zheng Wang
,
Wei Zhang
PDF
Cite
Project
Video
IEEE
arXiv
First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons
This paper presents preliminary results toward translating gait and control design for bipedal robots to decentralized control of an …
Ayush Agrawal
,
Omar Harib
,
Ayonga Hereid
,
Sylvain Finet
,
Matthieu Masselin
,
Laurent Praly
,
Aaron D Ames
,
Koushil Sreenath
,
Jessy W Grizzle
PDF
Cite
Project
Video
IEEE
Multi-contact bipedal robotic locomotion
This paper presents a formal framework for achieving multi-contact bipedal robotic walking, and realizes this methodology …
Huihua Zhao
,
Ayonga Hereid
,
Wen-Loong Ma
,
Aaron D Ames
PDF
Cite
Project
Video
Robotica
3D dynamic walking with underactuated humanoid robots: A direct collocation framework for optimizing hybrid zero dynamics
Hybrid zero dynamics (HZD) has emerged as a popular framework for dynamic and underactuated bipedal walking, but has significant …
Ayonga Hereid
,
Eric A Cousineau
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
Efficient HZD gait generation for three-dimensional underactuated humanoid running
Dynamic humanoid locomotion is a challenging control problem, and running is especially difficult to achieve, given the underactuation …
Wen-Loong Ma
,
Ayonga Hereid
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
Time dependent control Lyapunov functions and hybrid zero dynamics for stable robotic locomotion
Implementing state-based parameterized periodic trajectories on complex robotic systems, e.g., humanoid robots, can lead to instability …
Shishir Kolathaya
,
Ayonga Hereid
,
Aaron D Ames
PDF
Cite
Video
IEEE
Hybrid Zero Dynamics based Multiple Shooting Optimization with Applications to Robotic Walking
Hybrid zero dynamics (HZD) has emerged as a popular framework for the stable control of bipedal robotic gaits, but typically designing …
Ayonga Hereid
,
Christian M Hubicki
,
Eric A Cousineau
,
Jonathan W Hurst
,
Aaron D Ames
PDF
Cite
Project
Video
IEEE
Cite
×