Home
News
People
Projects
Publication
Gallery
Video
Contact
motion planning
Reinforcement learning-based cascade motion policy design for robust 3D bipedal locomotion
This paper presents a novel reinforcement learning (RL) framework to design cascade feedback control policies for 3D bipedal …
Guillermo A Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Robust feedback motion policy design using reinforcement learning on a 3d digit bipedal robot
In this paper, a hierarchical and robust framework for learning bipedal locomotion is presented and successfully implemented on the 3D …
Guillermo A Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
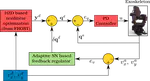
Adaptive feedback regulator for powered lower-limb exoskeleton under model uncertainty
This paper presents a neural network (NN) based adaptive feedback regulator to ensure the lateral and longitudinal stability and …
Kirtankumar Thakkar
,
Victor Paredes
,
Ayonga Hereid
PDF
Cite
Project
arXiv
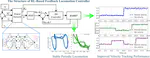
Hybrid zero dynamics inspired feedback control policy design for 3d bipedal locomotion using reinforcement learning
This paper presents a novel model-free reinforcement learning (RL) framework to design feedback control policies for 3D bipedal …
Guillermo A Castillo
,
Bowen Weng
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Reinforcement Learning Meets Hybrid Zero Dynamics: A case study for RABBIT
The design of feedback controllers for bipedal robots is challenging due to the hybrid nature of its dynamics and the complexity …
Guillermo A Castillo
,
Bowen Weng
,
Ayonga Hereid
,
Zheng Wang
,
Wei Zhang
PDF
Cite
Project
Video
IEEE
arXiv
Cite
×