Home
News
People
Projects
Publication
Gallery
Video
Contact
multi-contact locomotion
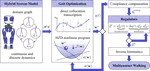
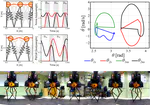
Algorithmic foundations of realizing multi-contact locomotion on the humanoid robot DURUS
This paper presents the meta-algorithmic approach used to realize multi-contact walking on the humanoid robot, DURUS. This systematic …
Jacob P Reher
,
Ayonga Hereid
,
Shishir Kolathaya
,
Christian M Hubicki
,
Aaron D Ames
PDF
Cite
Video
Springer
Multi-contact bipedal robotic locomotion
This paper presents a formal framework for achieving multi-contact bipedal robotic walking, and realizes this methodology …
Huihua Zhao
,
Ayonga Hereid
,
Wen-Loong Ma
,
Aaron D Ames
PDF
Cite
Project
Video
Robotica
3D multi-contact gait design for prostheses: Hybrid system models, virtual constraints and two-step direct collocation
Virtual constraints have been recognized as an essential bridging tool which has the potential to translate rich nonlinear bipedal …
Huihua Zhao
,
Ayonga Hereid
,
Eric Ambrose
,
Aaron D Ames
PDF
Cite
Project
Video
Dynamic multi-domain bipedal walking with atrias through slip based human-inspired control
This paper presents a methodology for achieving efficient multi-domain underactuated bipedal walking on compliant robots by formally …
Ayonga Hereid
,
Shishir Kolathaya
,
Mikhail S Jones
,
Johnathan Van Why
,
Jonathan W Hurst
,
Aaron D Ames
PDF
Cite
Project
Video
ACM
Cite
×