Home
News
People
Projects
Publication
Gallery
Video
Contact
optimization
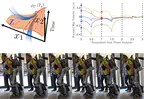
Dynamic Locomotion Control for Self-Balancing Lower-Limb Exoskeletons
We strive to advancing the field of lower-limb exoskeletons and developing innovative solutions to enhance mobility and independence for individuals with paraplegia.
Fast Robot Optimization and Simulation Toolkit (FROST)
In this project, we introduce FROST (Fast Robot Optimization and Simulation Toolkit), a powerful tool that enables fast trajectory optimization for high-dimensional robotic systems, such as humanoid robots.
Cite
×