Home
News
People
Projects
Publication
Gallery
Video
Contact
path planning
Real-Time Safe Bipedal Robot Navigation using Linear Discrete Control Barrier Functions
Safe navigation in real-time is an essential task for humanoid robots in real-world deployment. Since humanoid robots are inherently …
Chengyang Peng
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
Unified Path and Gait Planning for Safe Bipedal Robot Navigation
Safe path and gait planning are essential for bipedal robots to navigate complex real-world environments. The prevailing approaches …
Chengyang Peng
,
Victor Paredes
,
Guillermo A Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
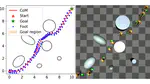
Safe Bipedal Path Planning via Control Barrier Functions for Polynomial Shape Obstacles Estimated Using Logistic Regression
Safe path planning is critical for bipedal robots to operate in safety-critical environments. Common path planning algorithms, such as …
Chengyang Peng
,
Octavian Donca
,
Guillermo Castillo
,
Ayonga Hereid
PDF
Cite
Project
Video
IEEE
Real-Time Navigation for Bipedal Robots in Dynamic Environments
The popularity of mobile robots has been steadily growing, with these robots being increasingly utilized to execute tasks previously …
Octavian Donca
,
Chayapol Beokhaimook
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
Cite
×