Home
News
People
Projects
Publication
Gallery
Video
Contact
robust control
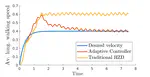
Velocity regulation of 3d bipedal walking robots with uncertain dynamics through adaptive neural network controller
This paper presents a neural-network based adaptive feedback control structure to regulate the velocity of 3D bipedal robots under …
Guillermo A Castillo
,
Bowen Weng
,
Terrence C Stewart
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
IEEE
Input to state stabilizing control lyapunov functions for robust bipedal robotic locomotion
This paper analyzes the input to state stability properties of controllers which stabilize hybrid periodic orbits. Systems that are …
Shishir Kolathaya
,
Jacob Reher
,
Ayonga Hereid
,
Aaron D Ames
PDF
Cite
IEEE
Cite
×