Home
News
People
Projects
Publication
Gallery
Video
Contact
supervised learning
Enhancing the performance of a safe controller via supervised learning for truck lateral control
Correct-by-construction techniques, such as control barrier functions (CBFs), can be used to guarantee closed-loop safety by acting as …
Yuxiao Chen
,
Ayonga Hereid
,
Huei Peng
,
Jessy Grizzle
PDF
Cite
Project
arXiv
ASME
Rapid Trajectory Optimization Using C-FROST with Illustration on a Cassie-Series Dynamic Walking Biped
One of the big attractions of low-dimensional models for gait design has been the ability to compute solutions rapidly, whereas one of …
Ayonga Hereid
,
Omar Harib
,
Ross Hartley
,
Yukai Gong
,
Jessy W Grizzle
PDF
Cite
Code
Project
Video
IEEE
arXiv
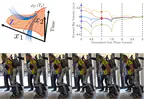
Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking
This manuscript presents control of a high-DOF fully actuated lower-limb exoskeleton for paraplegic individuals. The key novelty is the …
Omar Harib
,
Ayonga Hereid
,
Ayush Agrawal
,
Thomas Gurriet
,
Sylvain Finet
,
Guilhem Boeris
,
Alexis Duburcq
,
M Eva Mungai
,
Matthieu Masselin
,
Aaron D Ames
,
others
PDF
Cite
Project
Video
arXiv
IEEE
Cite
×