Home
News
People
Projects
Publication
Gallery
Video
Contact
template model
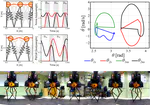
Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller …
Yuan Gao
,
Victor Paredes
,
Yukai Gong
,
Zijian He
,
Ayonga Hereid
,
Yan Gu
PDF
Cite
Project
Video
arXiv
Template model inspired task space learning for robust bipedal locomotion
This work presents a hierarchical framework for bipedal locomotion that combines a Reinforcement Learning (RL)-based high-level (HL) …
Guillermo A Castillo
,
Bowen Weng
,
Shunpeng Yang
,
Wei Zhang
,
Ayonga Hereid
PDF
Cite
Project
Video
arXiv
Time-Varying ALIP Model and Robust Foot-Placement Control for Underactuated Bipedal Robotic Walking on a Swaying Rigid Surface
Controller design for bipedal walking on dynamic rigid surfaces (DRSes), which are rigid surfaces moving in the inertial frame (e.g., …
Yuan Gao
,
Yukai Gong
,
Victor Paredes
,
Ayonga Hereid
,
Yan Gu
PDF
Cite
Project
IEEE
arXiv
Feedback control of a cassie bipedal robot: Walking, standing, and riding a segway
The Cassie bipedal robot designed by Agility Robotics is providing academics with a common platform for sharing and comparing …
Yukai Gong
,
Ross Hartley
,
Xingye Da
,
Ayonga Hereid
,
Omar Harib
,
Jiunn-Kai Huang
,
Jessy Grizzle
PDF
Cite
Code
Video
IEEE
arXiv
Dynamic multi-domain bipedal walking with atrias through slip based human-inspired control
This paper presents a methodology for achieving efficient multi-domain underactuated bipedal walking on compliant robots by formally …
Ayonga Hereid
,
Shishir Kolathaya
,
Mikhail S Jones
,
Johnathan Van Why
,
Jonathan W Hurst
,
Aaron D Ames
PDF
Cite
Project
Video
ACM
Embedding of slip dynamics on underactuated bipedal robots through multi-objective quadratic program based control
This paper presents a method for achieving stable periodic walking, consisting of phases of single and double support, on underactuated …
Ayonga Hereid
,
Matthew J Powell
,
Aaron D Ames
PDF
Cite
Video
IEEE
Cite
×