trajectory optimization

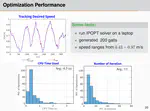
Online optimal gait generation for bipedal walking robots using legendre pseudospectral optimization
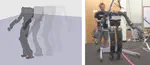
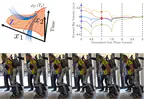
This paper presents an optimal gait synthesis method that exploits the full body dynamics of robots using the Hybrid Zero Dynamics …