Home
News
People
Projects
Publication
Gallery
Video
Contact
underactuated robots
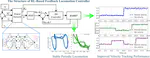
Reinforcement Learning Meets Hybrid Zero Dynamics: A case study for RABBIT
The design of feedback controllers for bipedal robots is challenging due to the hybrid nature of its dynamics and the complexity …
Guillermo A Castillo
,
Bowen Weng
,
Ayonga Hereid
,
Zheng Wang
,
Wei Zhang
PDF
Cite
Project
Video
IEEE
arXiv
Cite
×